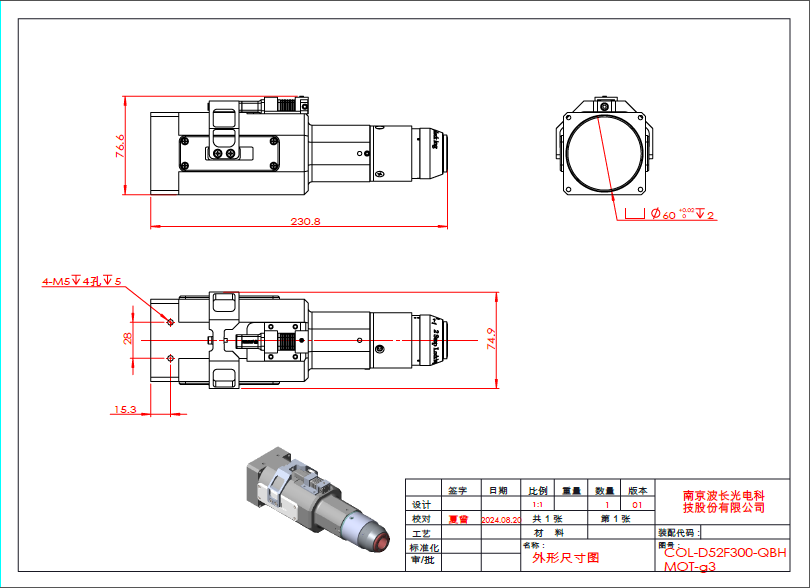
Kolimator elektroniczny z napędem silnikowym COL-D52F300-QBH-MOT






Kolimator elektroniczny z napędem silnikowym COL-D52F300-QBH-MOT
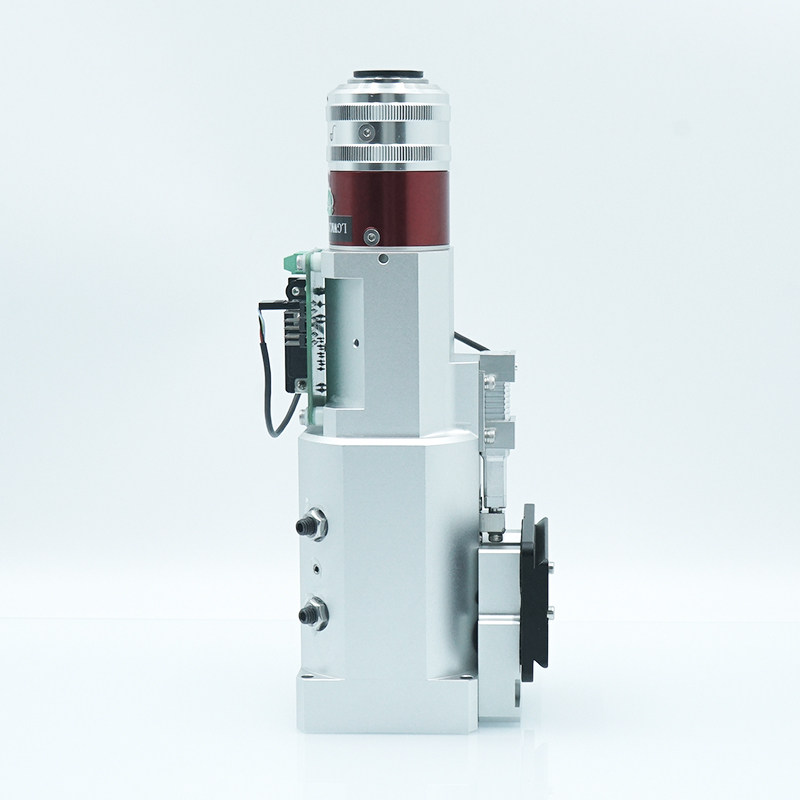
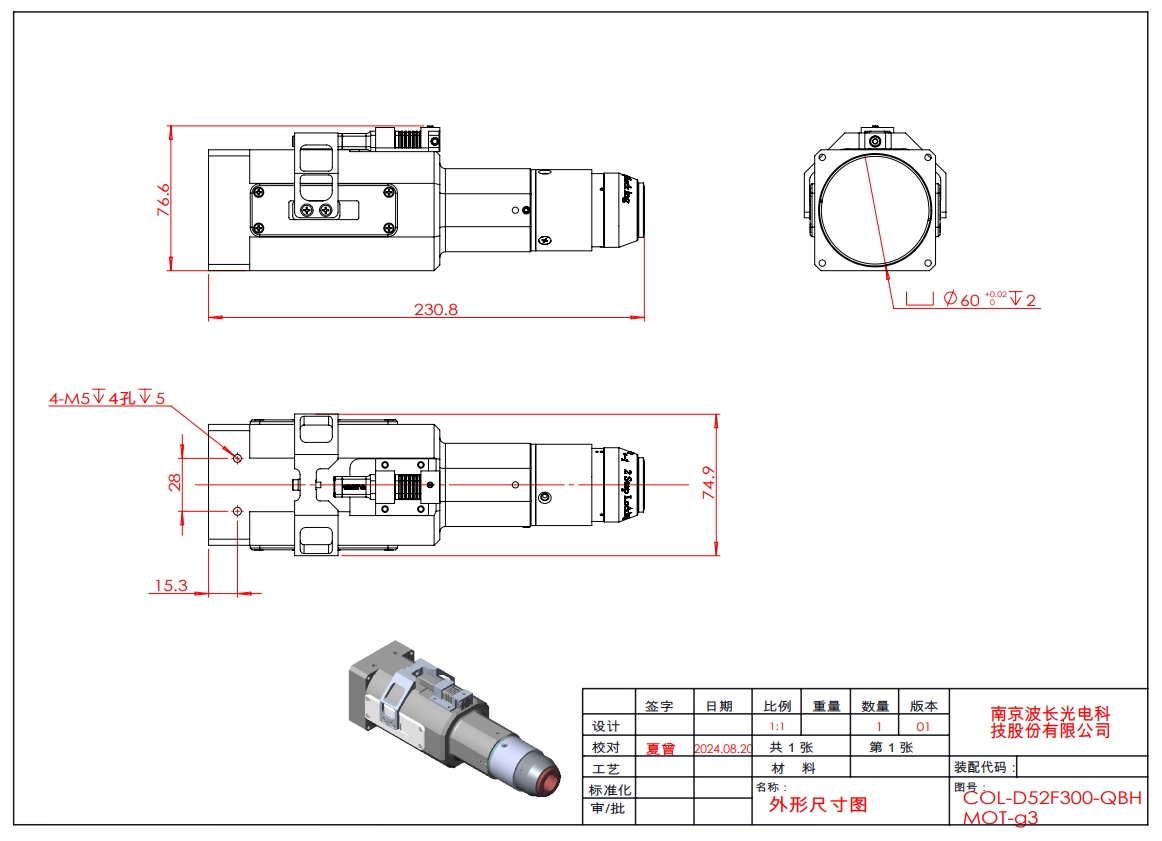
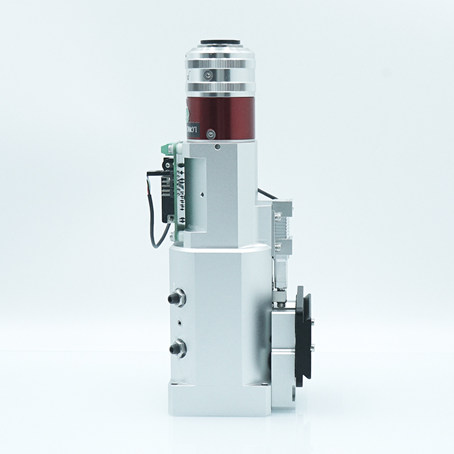
Kolimator elektroniczny z napędem silnikowym
Zasada działania kolimatora laserowego polega na skupieniu rozbieżnej wiązki światła przez jedną lub grupę soczewek o dodatniej ogniskowej, tak aby wiązka była równoległa do osi optycznej. Na przykład, jeśli wiązka emitowana z końcówki lasera światłowodowego jest mała i rozbiega się pod kątem kilku stopni, kolimator może skolimować wiązkę w wiązkę o większej średnicy, ale o bardzo małym kącie rozbieżności.





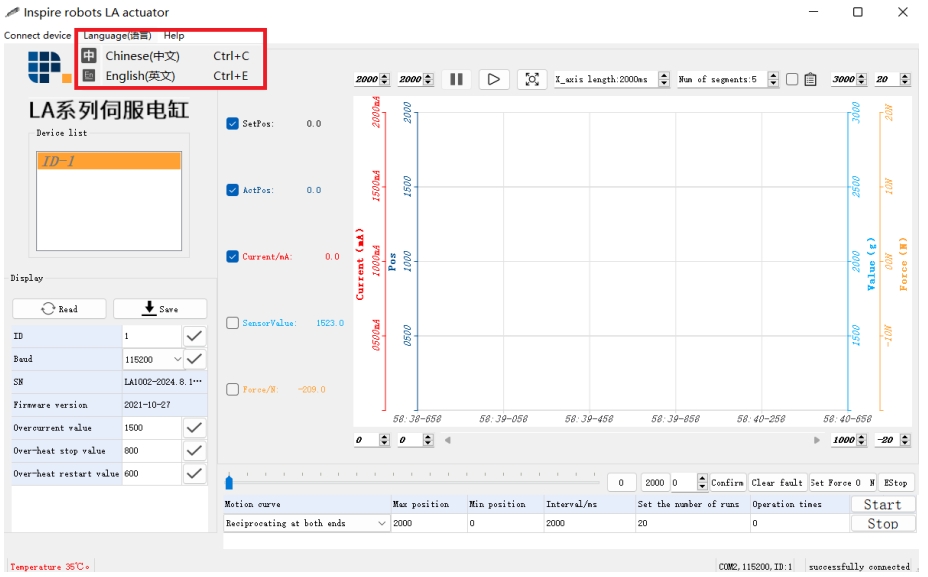
Instrukcja obsługi oprogramowania silnika D52-F300
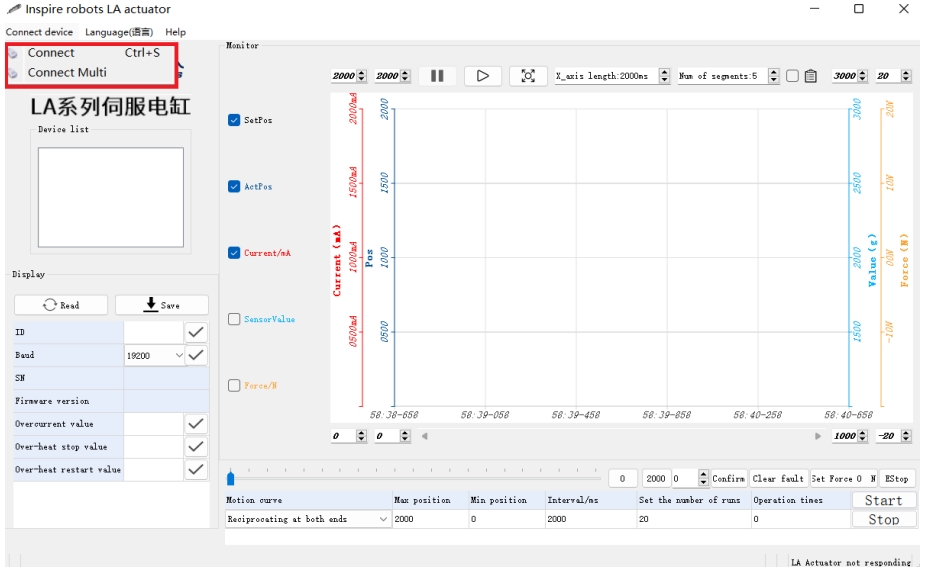
1. Podłączone urządzenie:
Menu „Wyszukaj urządzenie” -> wybierz port szeregowy, szybkość transmisji, zakres ID lub domyślne automatyczne wyszukiwanie -> kliknij „Szukaj”. Po pomyślnym wyszukaniu siłownika dane zostaną zaktualizowane w oknie krzywej danych i na pasku stanu u dołu okna głównego.
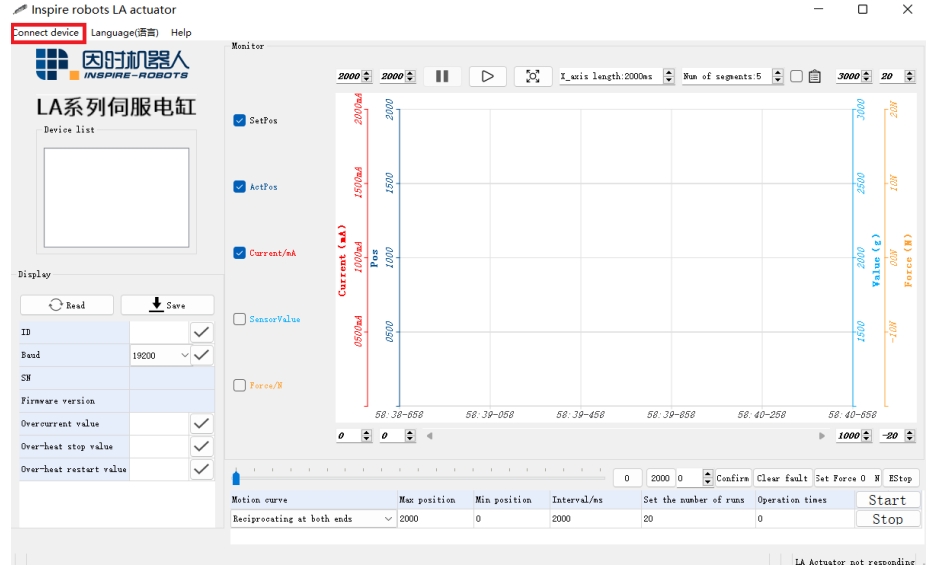
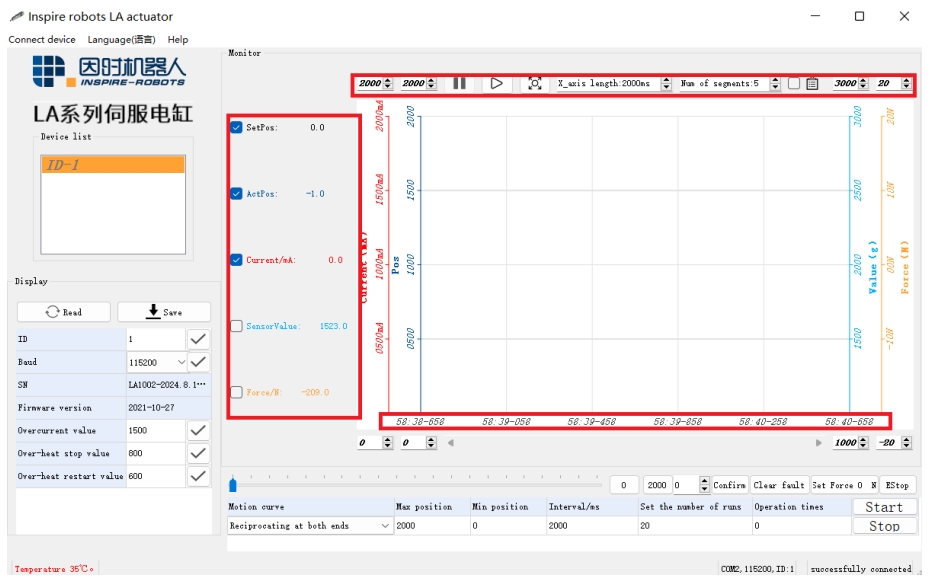
2. Monitorowanie informacji o statusie:
Po podłączeniu siłownika, wykres danych będzie wyświetlał informacje o stanie siłownika w czasie rzeczywistym, takie jak położenie, prąd i wartość akceptacji (systemy LAF, LASF). Dolny pasek stanu będzie wyświetlał informacje, takie jak temperatura siłownika, błąd i stan połączenia.
Wyświetlanie liczbowe 5 najważniejszych danych na wykresie i pole wyboru, czy wyświetlić krzywą;
Nad wykresem znajdują się cztery przyciski umożliwiające wstrzymanie, kontynuowanie, wyczyszczenie i przywrócenie zakresu wyświetlania krzywych w czasie rzeczywistym. Przeciąganie: Naciśnij i przytrzymaj prawy przycisk myszy, aby przeciągnąć krzywą na wykresie.
Powiększenie: Naciśnij i przytrzymaj lewy przycisk myszy, aby zaznaczyć określony obszar w celu powiększenia go na wykresie; Kliknij przycisk „Przywróć zakres osi współrzędnych”, a zakres wyświetlania powróci do normy;
Ustawianie zakresu osi danych: Zakres danych każdej osi danych można ustawić za pomocą pól tekstowych powyżej i poniżej osi danych;
Przeciąganie osi czasu: Gdy krzywa danych zatrzyma się, możesz przeciągnąć suwak poniżej osi czasu, aby przeciągnąć oś czasu;
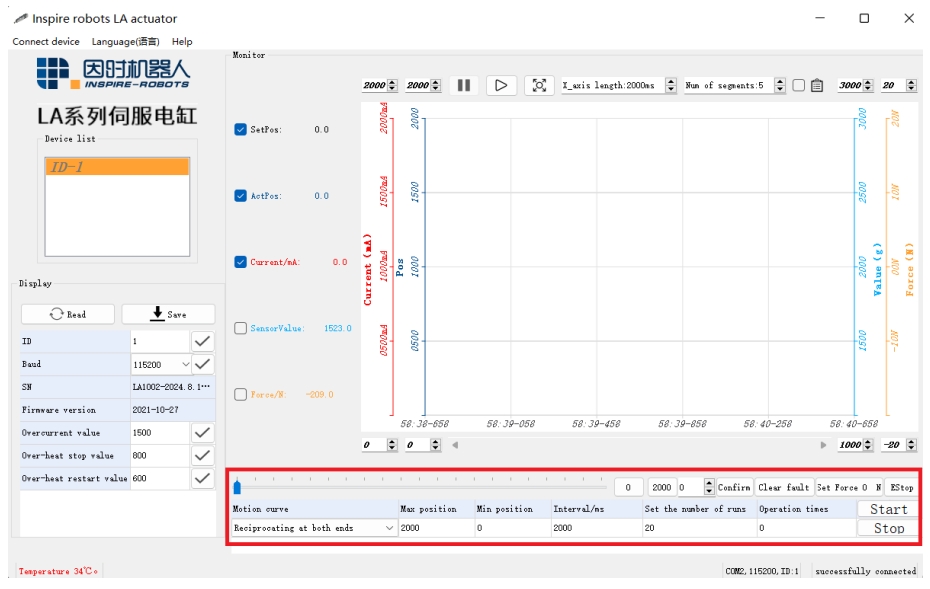
3. Sterowanie ruchem:
3.1 Przeciągając suwak lub ustawiając pole tekstowe po prawej stronie suwaka, można kontrolować położenie napędzanego popychacza.
3.2 Za pomocą tabeli znajdującej się poniżej suwaka położenia można ustawić okresowy ruch posuwisto-zwrotny siłownika.
3.2.1 Po wybraniu rodzaju ruchu posuwisto-zwrotnego i ustawieniu odpowiednich parametrów, rodzaj napędu będzie wykonywał ruch posuwisto-zwrotny z największą prędkością.
3.2.2 Po wybraniu fali trójkątnej lub sinusoidalnej i ustawieniu odpowiednich parametrów, typ sterowania będzie się zmieniał zgodnie z ustawionym kształtem fali.
3.3 Dwa przyciski po prawej stronie suwaka położenia mogą wysyłać do siłownika polecenia kasowania błędów i zatrzymania awaryjnego.
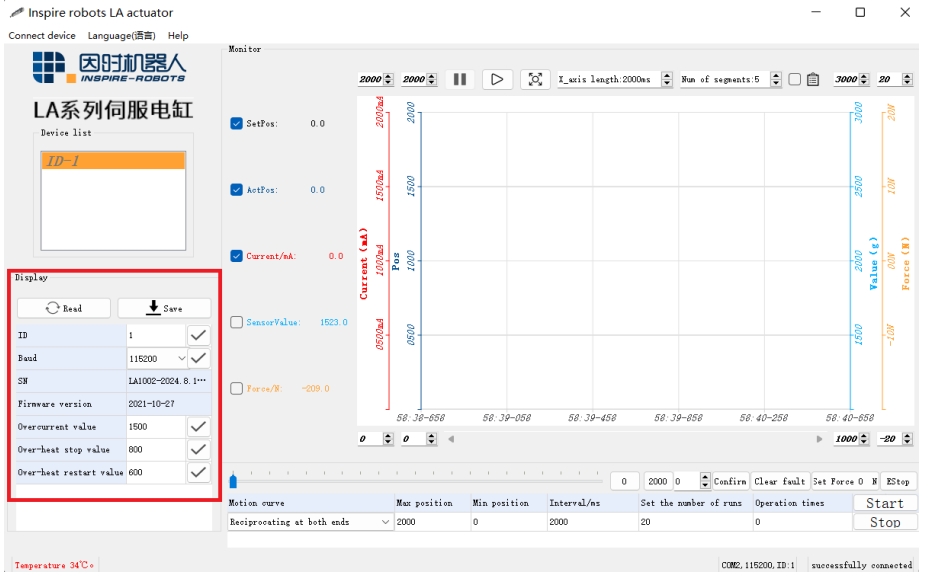
4. Ustawienia parametrów
4.1 Po kliknięciu „Odczytaj parametry” oprogramowanie wyświetli wewnętrzne parametry napędu w tabeli.
4.2 ID siłownika, zakres 1-254.
4.2 Prędkość portu szeregowego, która zaczyna obowiązywać po zapisaniu.
4.3 Wartość zabezpieczenia nadprądowego w zakresie 300–0,500 mA.
4.4 Wartość zabezpieczenia przed przegrzaniem, od 200 do 800 .
4.5 Należy pamiętać, że początkowa wartość powrotu temperatury może wynosić od 200 do 600, przy czym wartość zabezpieczenia przed przegrzaniem musi być o 50 wyższa od początkowej wartości powrotu temperatury, w przeciwnym razie parametry będą nieprawidłowe.
4.6 Wszelkie zmiany parametrów muszą zostać zapisane; w przeciwnym razie po wyłączeniu zasilania i ponownym uruchomieniu nastąpi błąd.
5. Przełączanie między językiem chińskim i angielskim
Menu „Język” -> Wybierz „Chiński” lub „Angielski”.
Ten elektroniczny kolimator umożliwia kolimację lasera światłowodowego i może efektywnie pracować na duże odległości; typ ręczny, wygodny w użyciu na zewnątrz; precyzyjna głowica elektryczna, szybkie namierzanie celu. Jednocześnie kolimator ten jest używany głównie do omijania przeszkód i nadaje się do laserów o mocy nieprzekraczającej 2000 W i wartości NA lasera nieprzekraczającej 0,065. Pasmo lasera wynosi około 1064 nm.
Kolimator elektroniczny z napędem silnikowym
Ten elektroniczny kolimator umożliwia kolimację lasera światłowodowego i może efektywnie pracować na duże odległości; typ ręczny, wygodna obsługa na zewnątrz; precyzyjna głowica elektryczna, szybkie namierzanie celu. JednocześnieTen kolimator jest używany głównie do wykrywania przeszkód i jest odpowiedni do laserów o mocy nieprzekraczającej 2000 W i wartości NA lasera nieprzekraczającej 0,065. Pasmo lasera wynosi około 1064 nm.




KATEGORIE PRODUKTÓW
Firma Wavelength od 20 lat koncentruje się na dostarczaniu produktów optycznych o wysokiej precyzji
